#include <occtl_topo_algo.h>
Public Attributes | |
| uint32_t | struct_version |
| const void * | p_next |
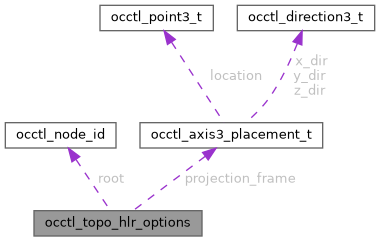
| occtl_node_id_t | root |
| occtl_axis3_placement_t | projection_frame |
| double | focus |
| int32_t | include_hidden |
| int32_t | include_smooth |
| int32_t | include_outline |
| occtl_topo_hlr_mode_t | mode |
Detailed Description
Configuration for occtl_topo_make_hlr_projection.
Projects a graph root through OCCT hidden-line removal. The frame follows OCCT HLR convention: projection_frame.location is the projection target, projection_frame.z_dir is the viewing direction, and projection_frame.x_dir is the horizontal direction of the drawing plane. Set focus <= 0.0 for parallel projection, or a positive focal distance for perspective projection.
Member Data Documentation
◆ focus
| double occtl_topo_hlr_options::focus |
Perspective focus distance; <= 0 selects parallel projection.
◆ include_hidden
| int32_t occtl_topo_hlr_options::include_hidden |
0/1; include hidden categories. Default 1.
◆ include_outline
| int32_t occtl_topo_hlr_options::include_outline |
0/1; include outline categories. Default 1.
◆ include_smooth
| int32_t occtl_topo_hlr_options::include_smooth |
0/1; include smooth and seam categories. Default 1.
◆ mode
| occtl_topo_hlr_mode_t occtl_topo_hlr_options::mode |
HLR algorithm. Default OCCTL_TOPO_HLR_BREP.
◆ p_next
| const void* occtl_topo_hlr_options::p_next |
Reserved; set to NULL.
◆ projection_frame
| occtl_axis3_placement_t occtl_topo_hlr_options::projection_frame |
Camera-like projection frame.
◆ root
| occtl_node_id_t occtl_topo_hlr_options::root |
Borrows it. Shape root to project.
◆ struct_version
| uint32_t occtl_topo_hlr_options::struct_version |
Must be OCCTL_TOPO_HLR_OPTIONS_VERSION_1.
The documentation for this struct was generated from the following file:
- include/occtl/occtl_topo_algo.h